라이드플럭스-한양대, CVPR 2025 웨이모 챌린지 자율주행 부문 세계 3위 입상
🤖 AI 추천
자율주행 기술 개발에 참여하는 연구원, AI 엔지니어, 머신러닝 엔지니어, 그리고 관련 분야에 관심 있는 IT 개발자들에게 추천합니다. 특히 엔드투엔드(E2E) 자율주행 시스템의 비전 기반 기술 및 경로 계획 알고리즘에 대한 이해를 높이고 싶은 분들에게 유용합니다.
🔖 주요 키워드
핵심 기술: 라이드플럭스와 한양대 연구팀이 CVPR 2025 웨이모 챌린지 자율주행 부문에서 3위에 입상하며, 비전 기반 엔드투엔드(E2E) 자율주행 기술의 경쟁력을 입증했습니다.
기술적 세부사항:
* E2E 자율주행: AI 모델이 주행 영상 데이터를 학습하여 인지, 예측, 판단, 제어를 통합적으로 수행하는 방식입니다.
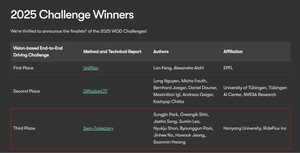
* 경로 계획 모델: 웨이모가 공개한 카메라 영상 데이터를 기반으로 자율주행차의 이동 경로를 효과적으로 계획하는 알고리즘을 제안했습니다.
* AI 기반 알고리즘: 구조화된 차량 이력과 이미지 맥락을 파악하여 미래 궤적을 계획하는 기술을 활용했습니다.
* 성능: 효과적인 시공간 모델링을 통해 높은 정확도를 달성했으며, 상용 GPU에서 약 14ms의 빠른 연산 속도를 보여 실시간 처리에 적합합니다.
* 참가팀: 엔비디아, 샤오미, 스위스 로잔연방공대, 캐나다 MILA AI 연구소 등 총 29개 팀이 참가하여 높은 경쟁률을 보였습니다.
개발 임팩트:
* 순수 국내 기술의 자율주행 분야 글로벌 경쟁력 확인 및 기술적 우수성 입증.
* 실시간 처리가 중요한 자율주행 시스템에 적용 가능한 고효율, 고정확도 알고리즘 개발 가능성 제시.
* 양질의 자율주행 데이터를 기반으로 한 지속적인 R&D 역량 강화 및 신뢰도 높은 자율주행 솔루션 개발 기대.
커뮤니티 반응: (본문 내 직접적인 커뮤니티 반응 언급 없음)