라이드플럭스, 한양대와 '웨이모 챌린지' 자율주행 부문 세계 3위 입상
카테고리
프로그래밍/소프트웨어 개발
서브카테고리
인공지능
대상자
- *AI 연구자, 자율주행 개발자, 자동차 산업 기술 담당자**
- 난이도: 중급~고급 (AI 모델 설계, 실시간 처리 기술 등 전문 지식 필요)*
핵심 요약
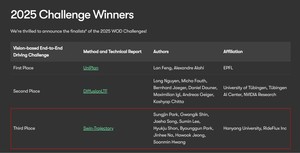
- 라이드플럭스와 한양대학교 IRCV 연구팀이 CVPR 2025 웨이모 오픈 데이터 챌린지에서 자율주행 부문 3위 달성
- 비전 기반 E2E(End-to-end) 자율주행 기술을 활용한 시공간 모델링 알고리즘 개발
- 14ms의 실시간 연산 속도를 기록하며 상용 GPU 기반의 고성능 처리 가능
섹션별 세부 요약
1. 챌린지 개요 및 경쟁 구도
- 웨이모 오픈 데이터 챌린지는 29개국의 AI 연구팀이 참여한 자율주행 분야 최고 권위 행사
- E2E 기술 기반 경쟁이 가장 치열한 부문으로, 엔비디아, 샤오미, MILA AI 연구소 등 경쟁자 포함
- 웨이모 데이터셋을 기반으로 자율주행차의 이동 경로 계획 모델 개발 요구
2. 핵심 기술 및 알고리즘
- 비전 기반 E2E 자율주행 시스템은 AI 모델을 통해 주행 영상 데이터 학습 후 인식-예측-제어 통합 수행
- 시공간 모델링 알고리즘은 차량 이력과 이미지 맥락을 AI 기술로 구조화하여 미래 궤적 계획
- 14ms의 연산 속도로 실시간 처리 가능, 상용 GPU에서 고성능 구현
3. 기술적 영향 및 미래 전략
- 라이드플럭스는 국내 AI 기술 경쟁력을 재확인하며 자율주행 서비스 데이터를 기반으로 R&D 강화 계획
- E2E 기술을 통해 자율주행차의 안정성 및 예측 정확도 향상
- 웨이모 데이터셋 활용을 통한 모델 성능 개선 가능성 제시
결론
- E2E 기술과 실시간 연산 속도는 자율주행의 핵심 성공 요소로, 라이드플럭스의 AI 기술력을 입증
- 웨이모 챌린지에서의 성과는 국내 자율주행 기술의 글로벌 경쟁력을 강조하며, R&D 투자 확대를 유도
- 시공간 모델링 알고리즘의 14ms 처리 속도는 실시간 주행 시스템 설계에 중요한 기준이 될 전망