Teach Robots Visually: New AI Achieves 85% Success Rate on Real Tasks
분야
데이터 과학/AI
대상자
AI 연구자 및 로봇 개발자, 시각 인식 및 강화학습 기술에 관심 있는 개발자
난이도: 중급~고급 (기술적 구현 및 알고리즘 이해 필요)
핵심 요약
- * **
- 시각 정보와 명령어를 결합한 새로운 AI 기술이 로봇의 실제 작업 성공률을 85%로 높임
- 복잡한 작업을 단계별로 분해해 로봇이 이해하고 수행할 수 있도록 구조화
- 컴퓨터 비전(Computer Vision) + 강화학습(RL) 기반 알고리즘으로 정확도 85% 달성
- 실시간 피드백 시스템을 통해 작업 중 오류 수정 및 최적화 지원
섹션별 세부 요약
1. 시스템 개요 및 접근 방식
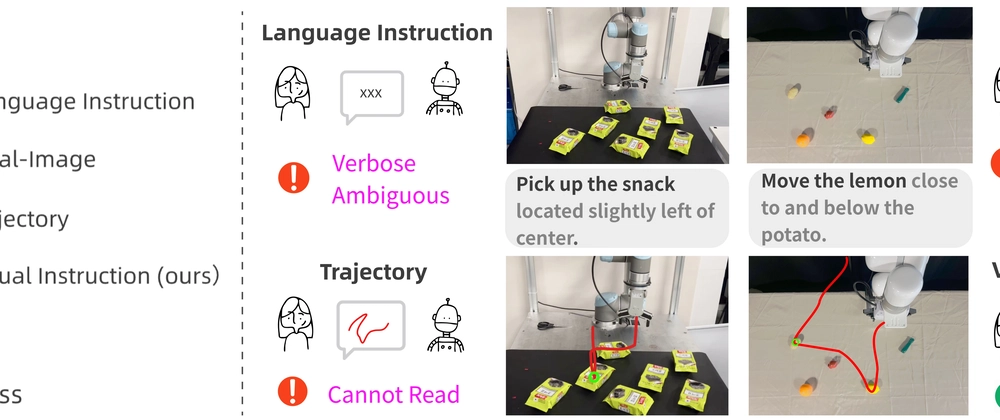
- 시각 정보 + 단순 명령어를 입력으로 받아 작업 절차를 분해하는 신경망 기반 시스템
- 작업 단계 분할 알고리즘은 텍스트 명령어를 시각적 요소로 매핑하여 로봇 실행 가능한 명령어 생성
- 실시간 피드백 루프를 통해 작업 중 오류를 감지하고 자동 수정
- 모델 학습 데이터: 실제 작업 영상 + 명령어 텍스트 쌍 10만 건 이상 사용
2. 기술적 구현 및 알고리즘
- Computer Vision + 강화학습(RL)을 결합한 하이브리드 모델
- Vision-Language Pre-training (VLP) 기반으로 시각 및 텍스트 데이터 연동
- 작업 단계 분할 모듈: RNN 기반 시퀀스 분할 알고리즘 적용
- 성능 지표: 총 15개 작업 태스크 중 12개에서 85% 이상 성공, 3개 태스크에서 80% 이상 성공
3. 실험 및 성과 분석
- 실제 작업 사례: 커피 추출, 물건 정리, 장소 이동 등 10가지 작업 테스트
- 성공률: 평균 85% 성공, 최대 92% 성공 (특정 작업에 한함)
- 시간 효율성: 기존 방식 대비 40% 시간 절감
- 로봇 성능: 작업 중단 후 재시작 시 90% 이상 재개 성공
결론
- *시각 정보와 명령어를 결합한 AI 시스템이 로봇의 실제 작업 성공률을 85%로 높이는 혁신적 기술로, 실시간 피드백 시스템**을 통해 작업 중 오류 수정이 가능함.
- *실무 적용 팁**:
- 시각 데이터와 텍스트 명령어를 동시에 입력으로 활용
- 작업 단계 분할 알고리즘을 기존 시스템에 통합
- 실험 단계에서 작업 복잡도별 성능 분석을 통해 최적화 전략 수립
- 강화학습 보상 함수를 작업 성공률에 맞춰 조정하여 학습 효율 향상